주요 특징
실시간 코드 실행
웹 브라우저에서 Python 코드를 작성하고 로봇에서 즉시 실행할 수 있습니다.
로봇 제어
PathFinder 키트의 센서와 모터를 직접 제어하여 다양한 로봇 프로젝트를 구현하세요.
무선 연결
Wi-Fi를 통해 로봇과 연결되어 케이블 없이도 자유롭게 프로그래밍할 수 있습니다.
실시간 모니터링
센서 데이터와 로봇 상태를 실시간으로 모니터링하고 시각화할 수 있습니다.
교육용 튜토리얼
단계별 튜토리얼을 통해 Python과 로봇 프로그래밍을 쉽게 배울 수 있습니다.
다중 사용자 지원
여러 사용자가 동시에 로봇을 사용할 수 있으며, 각자의 계정으로 관리됩니다.
사용 방법
1
PathFinder 키트 준비
PathFinder 키트를 준비하고 전원을 켜세요. AP 모드로 시작됩니다.
2
Wi-Fi 연결 설정
키트의 웹 인터페이스에서 Wi-Fi 정보를 입력하여 인터넷에 연결하세요.
3
계정 생성 및 로그인
이 웹사이트에서 계정을 생성하고 로그인하세요.
4
로봇 연결 및 프로그래밍
에디터에서 로봇을 선택하고 Python 코드를 작성하여 실행하세요.
스크린샷
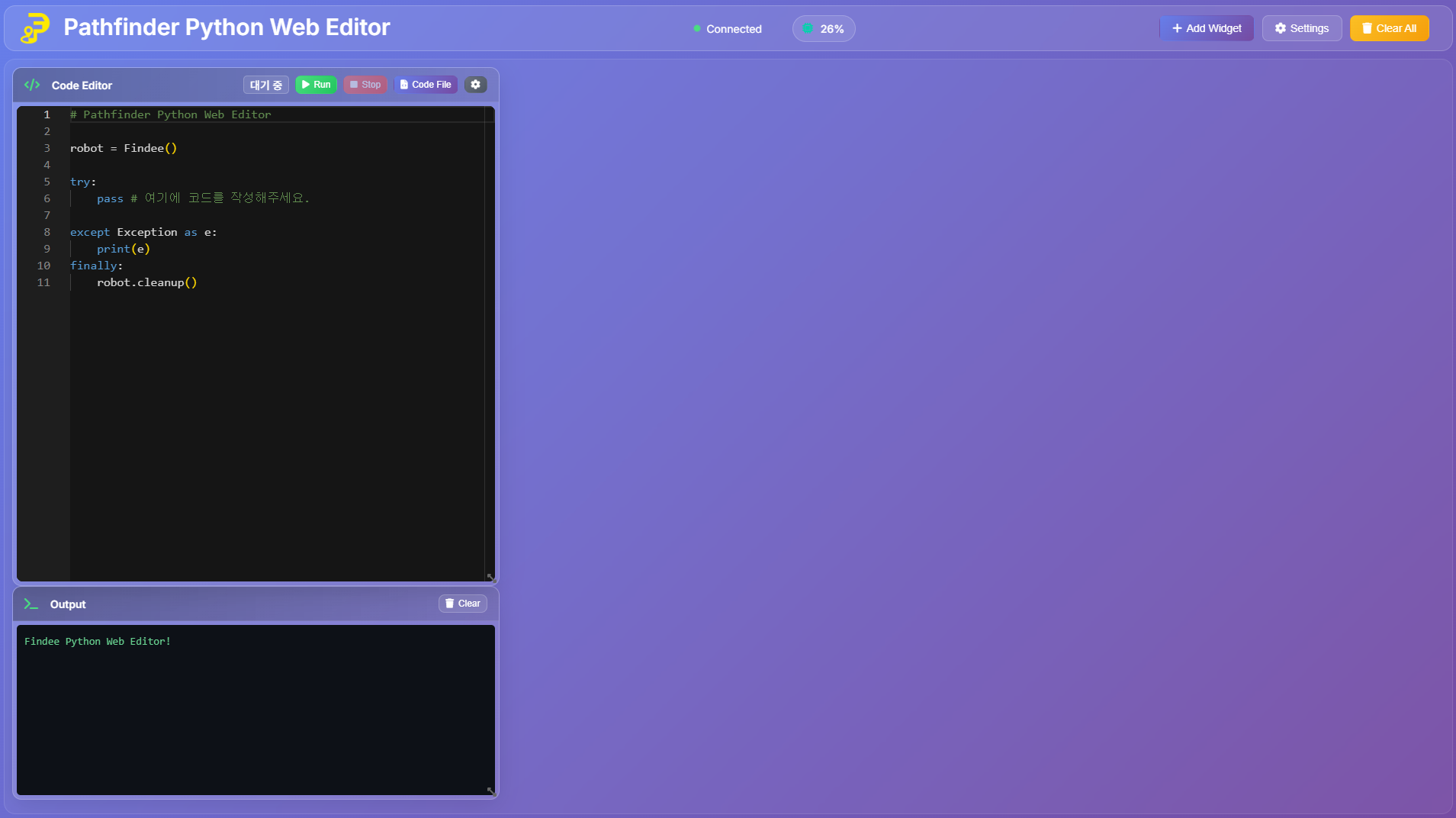
메인 에디터
코드 작성 및 실행을 위한 메인 인터페이스
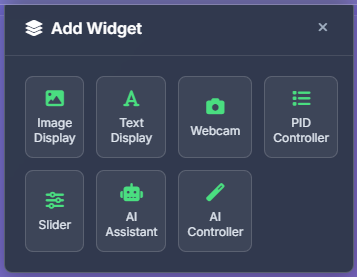
위젯 시스템
센서 데이터 시각화 및 로봇 제어 위젯